Full Version: Configure Joints and Rig Pose Limits
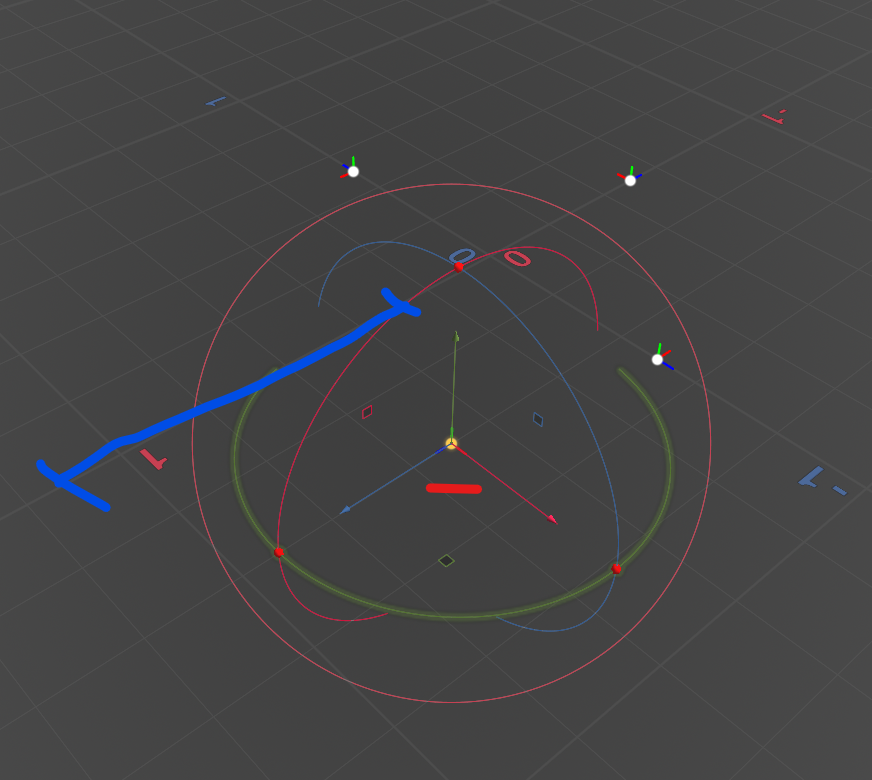
How can I use locally oriented limits with configure joints and rig points? In my scene I am using a configure joints and settings z axis limits but when I go into rig pose, the limits are accounted for in world space?!