|
HDK
|
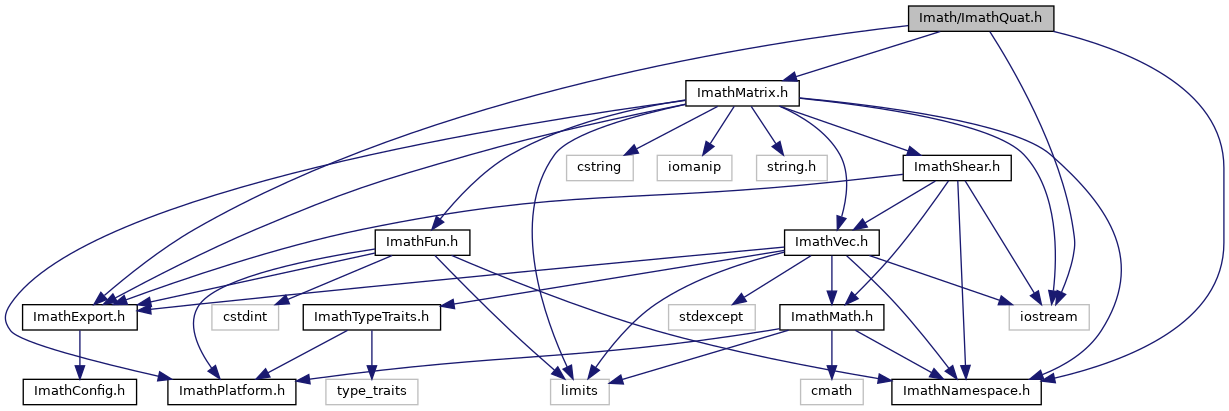
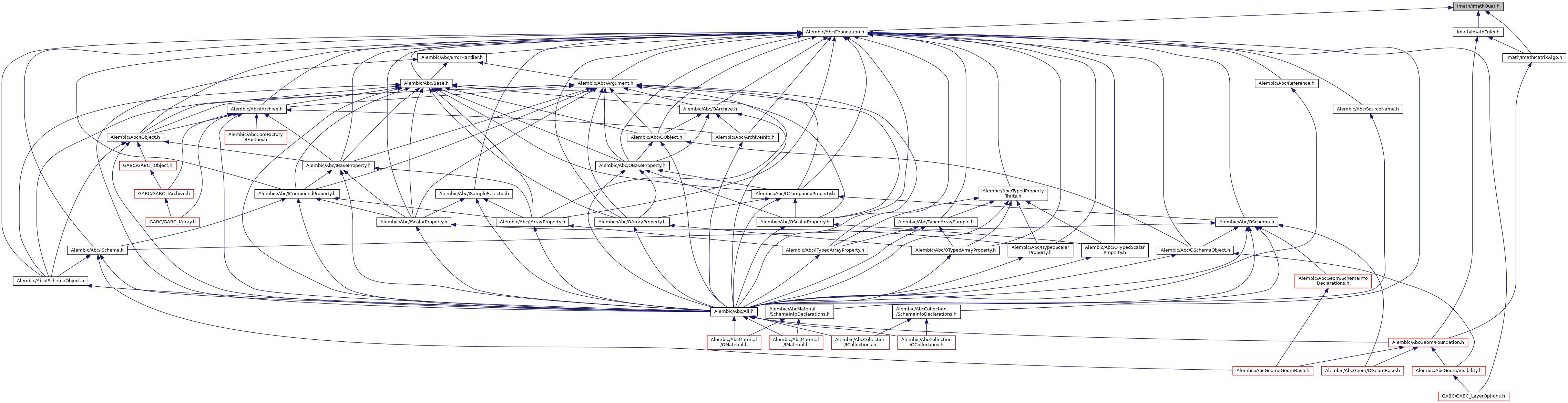
 Include dependency graph for ImathQuat.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for ImathQuat.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Classes | |
| class | Quat< T > |
Typedefs | |
| typedef Quat< float > | Quatf |
| Quaternion of type float. More... | |
| typedef Quat< double > | Quatd |
| Quaternion of type double. More... | |
Functions | |
| template<class T > | |
| IMATH_HOSTDEVICE IMATH_CONSTEXPR14 Quat< T > | slerp (const Quat< T > &q1, const Quat< T > &q2, T t) IMATH_NOEXCEPT |
| template<class T > | |
| IMATH_HOSTDEVICE IMATH_CONSTEXPR14 Quat< T > | slerpShortestArc (const Quat< T > &q1, const Quat< T > &q2, T t) IMATH_NOEXCEPT |
| template<class T > | |
| IMATH_HOSTDEVICE IMATH_CONSTEXPR14 Quat< T > | squad (const Quat< T > &q1, const Quat< T > &q2, const Quat< T > &qa, const Quat< T > &qb, T t) IMATH_NOEXCEPT |
| template<class T > | |
| IMATH_HOSTDEVICE void | intermediate (const Quat< T > &q0, const Quat< T > &q1, const Quat< T > &q2, const Quat< T > &q3, Quat< T > &qa, Quat< T > &qb) IMATH_NOEXCEPT |
| template<class T > | |
| IMATH_HOSTDEVICE constexpr Matrix33< T > | operator* (const Matrix33< T > &M, const Quat< T > &q) IMATH_NOEXCEPT |
| template<class T > | |
| IMATH_HOSTDEVICE constexpr Matrix33< T > | operator* (const Quat< T > &q, const Matrix33< T > &M) IMATH_NOEXCEPT |
| template<class T > | |
| std::ostream & | operator<< (std::ostream &o, const Quat< T > &q) |
| Stream output as "(r x y z)". More... | |
| template<class T > | |
| IMATH_HOSTDEVICE constexpr Quat< T > | operator* (const Quat< T > &q1, const Quat< T > &q2) IMATH_NOEXCEPT |
| Quaterion multiplication. More... | |
| template<class T > | |
| IMATH_HOSTDEVICE constexpr Quat< T > | operator/ (const Quat< T > &q1, const Quat< T > &q2) IMATH_NOEXCEPT |
| Quaterion division. More... | |
| template<class T > | |
| IMATH_HOSTDEVICE constexpr Quat< T > | operator/ (const Quat< T > &q, T t) IMATH_NOEXCEPT |
| Quaterion division. More... | |
| template<class T > | |
| IMATH_HOSTDEVICE constexpr Quat< T > | operator* (const Quat< T > &q, T t) IMATH_NOEXCEPT |
| template<class T > | |
| IMATH_HOSTDEVICE constexpr Quat< T > | operator* (T t, const Quat< T > &q) IMATH_NOEXCEPT |
| template<class T > | |
| IMATH_HOSTDEVICE constexpr Quat< T > | operator+ (const Quat< T > &q1, const Quat< T > &q2) IMATH_NOEXCEPT |
| Quaterion addition. More... | |
| template<class T > | |
| IMATH_HOSTDEVICE constexpr Quat< T > | operator- (const Quat< T > &q1, const Quat< T > &q2) IMATH_NOEXCEPT |
| Quaterion subtraction. More... | |
| template<class T > | |
| IMATH_HOSTDEVICE constexpr Quat< T > | operator~ (const Quat< T > &q) IMATH_NOEXCEPT |
| Compute the conjugate. More... | |
| template<class T > | |
| IMATH_HOSTDEVICE constexpr Quat< T > | operator- (const Quat< T > &q) IMATH_NOEXCEPT |
| Negate the quaterion. More... | |
| template<class T > | |
| IMATH_HOSTDEVICE IMATH_CONSTEXPR14 Vec3< T > | operator* (const Vec3< T > &v, const Quat< T > &q) IMATH_NOEXCEPT |
| template<class T > | |
| IMATH_HOSTDEVICE constexpr T | operator^ (const Quat< T > &q1, const Quat< T > &q2) IMATH_NOEXCEPT |
| 4D dot product More... | |
| template<class T > | |
| IMATH_HOSTDEVICE IMATH_CONSTEXPR14 T | angle4D (const Quat< T > &q1, const Quat< T > &q2) IMATH_NOEXCEPT |
| template<class T > | |
| IMATH_HOSTDEVICE IMATH_CONSTEXPR14 Quat< T > | spline (const Quat< T > &q0, const Quat< T > &q1, const Quat< T > &q2, const Quat< T > &q3, T t) IMATH_NOEXCEPT |
| template<class T > | |
| IMATH_HOSTDEVICE IMATH_CONSTEXPR14 Quat< T > | intermediate (const Quat< T > &q0, const Quat< T > &q1, const Quat< T > &q2) IMATH_NOEXCEPT |
Quaternion of type double.
Definition at line 301 of file ImathQuat.h.
Quaternion of type float.
Definition at line 298 of file ImathQuat.h.
|
inline |
Compute the angle between two quaternions, interpreting the quaternions as 4D vectors.
Definition at line 546 of file ImathQuat.h.
| IMATH_HOSTDEVICE void intermediate | ( | const Quat< T > & | q0, |
| const Quat< T > & | q1, | ||
| const Quat< T > & | q2, | ||
| const Quat< T > & | q3, | ||
| Quat< T > & | qa, | ||
| Quat< T > & | qb | ||
| ) |
From advanced Animation and Rendering Techniques by Watt and Watt, Page 366:
computing the inner quadrangle points (qa and qb) to guarantee tangent continuity.
|
inline |
Compute the intermediate point between three quaternions q0, q1, and q2.
Definition at line 662 of file ImathQuat.h.
|
inline |
|
inline |
|
inline |
Quaterion multiplication.
Definition at line 925 of file ImathQuat.h.
|
inline |
|
inline |
|
inline |
|
inline |
Quaterion addition.
Definition at line 968 of file ImathQuat.h.
|
inline |
Quaterion subtraction.
Definition at line 976 of file ImathQuat.h.
|
inline |
Negate the quaterion.
Definition at line 992 of file ImathQuat.h.
|
inline |
Quaterion division.
Definition at line 934 of file ImathQuat.h.
|
inline |
Quaterion division.
Definition at line 942 of file ImathQuat.h.
| std::ostream & operator<< | ( | std::ostream & | o, |
| const Quat< T > & | q | ||
| ) |
Stream output as "(r x y z)".
Definition at line 916 of file ImathQuat.h.
|
inline |
4D dot product
Definition at line 451 of file ImathQuat.h.
|
inline |
Compute the conjugate.
Definition at line 984 of file ImathQuat.h.
|
inline |
Spherical linear interpolation. Assumes q1 and q2 are normalized and that q1 != -q2.
This method does not interpolate along the shortest arc between q1 and q2. If you desire interpolation along the shortest arc, and q1^q2 is negative, then consider calling slerpShortestArc(), below, or flipping the second quaternion explicitly.
The implementation of squad() depends on a slerp() that interpolates as is, without the automatic flipping.
Don Hatch explains the method we use here on his web page, The Right Way to Calculate Stuff, at http://www.plunk.org/~hatch/rightway.php
Definition at line 576 of file ImathQuat.h.
|
inline |
Spherical linear interpolation along the shortest arc from q1 to either q2 or -q2, whichever is closer. Assumes q1 and q2 are unit quaternions.
Definition at line 593 of file ImathQuat.h.
|
inline |
Spherical Cubic Spline Interpolation - from Advanced Animation and Rendering Techniques by Watt and Watt, Page 366:
A spherical curve is constructed using three spherical linear interpolations of a quadrangle of unit quaternions: q1, qa, qb, q2. Given a set of quaternion keys: q0, q1, q2, q3, this routine does the interpolation between q1 and q2 by constructing two intermediate quaternions: qa and qb. The qa and qb are computed by the intermediate function to guarantee the continuity of tangents across adjacent cubic segments. The qa represents in-tangent for q1 and the qb represents the out-tangent for q2.
The q1 q2 is the cubic segment being interpolated.
The q0 is from the previous adjacent segment and q3 is from the next adjacent segment. The q0 and q3 are used in computing qa and qb.
Definition at line 621 of file ImathQuat.h.
|
inline |
Spherical Quadrangle Interpolation - from Advanced Animation and Rendering Techniques by Watt and Watt, Page 366:
It constructs a spherical cubic interpolation as a series of three spherical linear interpolations of a quadrangle of unit quaternions.
Definition at line 644 of file ImathQuat.h.
 1.8.6
1.8.6