|
| template<typename T0 , typename T1 > |
Mat3< typename promote< T0, T1 >
::type > | openvdb::OPENVDB_VERSION_NAME::math::operator* (const Mat3< T0 > &m0, const Mat3< T1 > &m1) |
| | Multiply m0 by m1 and return the resulting matrix. More...
|
| |
| template<typename T > |
| Mat3< T > | openvdb::OPENVDB_VERSION_NAME::math::outerProduct (const Vec3< T > &v1, const Vec3< T > &v2) |
| |
| template<typename T , typename T0 > |
| Mat3< T > | openvdb::OPENVDB_VERSION_NAME::math::powLerp (const Mat3< T0 > &m1, const Mat3< T0 > &m2, T t) |
| |
| template<typename T > |
| void | openvdb::OPENVDB_VERSION_NAME::math::mat3_internal::pivot (int i, int j, Mat3< T > &S, Vec3< T > &D, Mat3< T > &Q) |
| |
| template<typename T > |
| bool | openvdb::OPENVDB_VERSION_NAME::math::diagonalizeSymmetricMatrix (const Mat3< T > &input, Mat3< T > &Q, Vec3< T > &D, unsigned int MAX_ITERATIONS=250) |
| | Use Jacobi iterations to decompose a symmetric 3x3 matrix (diagonalize and compute eigenvectors) More...
|
| |
| template<typename T > |
| Mat3< T > | openvdb::OPENVDB_VERSION_NAME::math::Abs (const Mat3< T > &m) |
| |
| template<typename Type1 , typename Type2 > |
| Mat3< Type1 > | openvdb::OPENVDB_VERSION_NAME::math::cwiseAdd (const Mat3< Type1 > &m, const Type2 s) |
| |
| template<typename T > |
| bool | openvdb::OPENVDB_VERSION_NAME::math::cwiseLessThan (const Mat3< T > &m0, const Mat3< T > &m1) |
| |
| template<typename T > |
| bool | openvdb::OPENVDB_VERSION_NAME::math::cwiseGreaterThan (const Mat3< T > &m0, const Mat3< T > &m1) |
| |
| template<> |
| math::Mat3s | openvdb::OPENVDB_VERSION_NAME::zeroVal< math::Mat3s > () |
| |
| template<> |
| math::Mat3d | openvdb::OPENVDB_VERSION_NAME::zeroVal< math::Mat3d > () |
| |
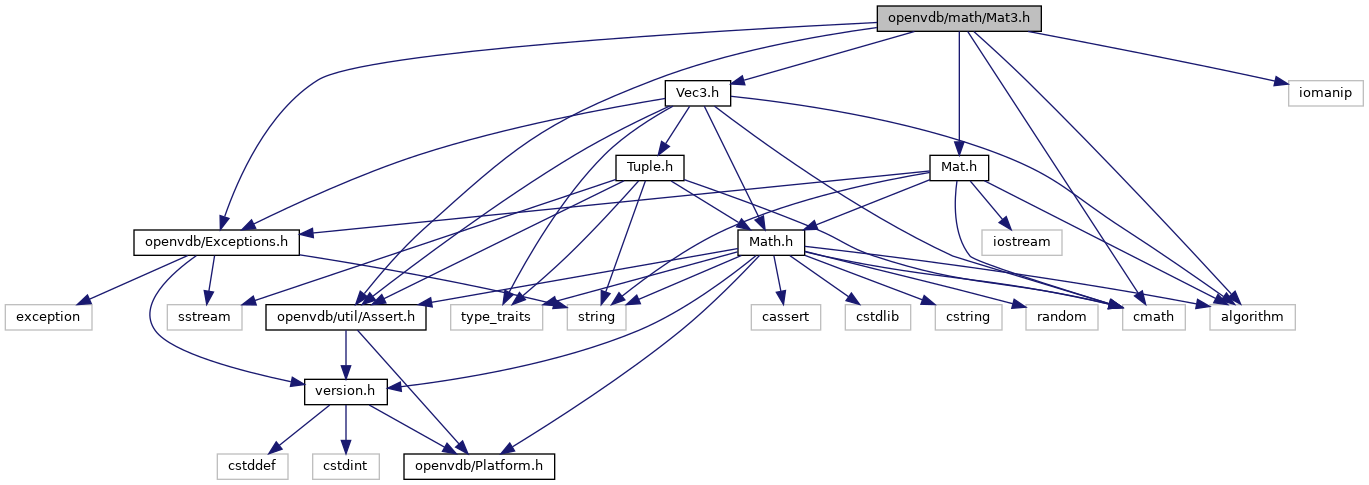
 Include dependency graph for Mat3.h:
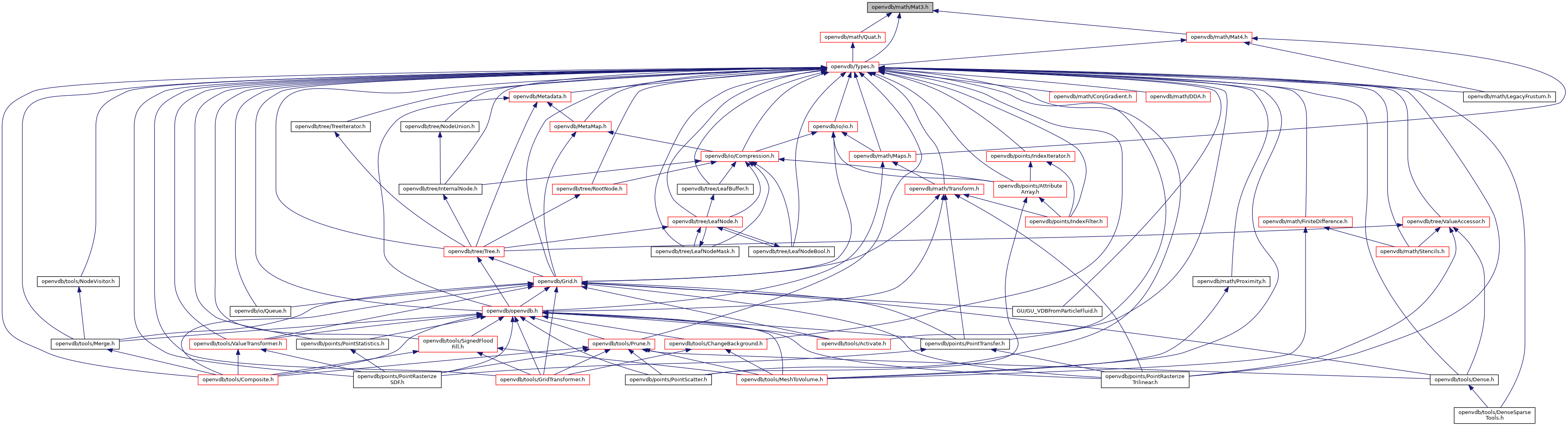
Include dependency graph for Mat3.h: 1.8.6
1.8.6