| On this page |
画角とHoudiniの焦点距離 ¶
Houdiniのカメラと現実世界のカメラは、測定したレンズの水平画角を一致させて、Houdini焦点距離をデフォルトの絞り41.4214の値に再現することで良好な結果が得られます。
これは、ピンクッション型(内方向)の歪曲と樽形(外方向)の歪曲を無視します。これらの歪曲はグリッドを映すことで設定してテストをレンダリングしなければなりません。あなたは、カメラのTVの安全フレームの水平画角を測定しなければなりません。
スキャンしたフィルム画像 ¶
スキャンしたフィルム画像では、単にスキャンした画像のピクセル幅をスキャナーのピクセル/mmで分割することができ、この数字を絞りチャンネルに挿入することができます。それから、焦点距離を実写の焦点距離に設定します。
便利な数式 ¶
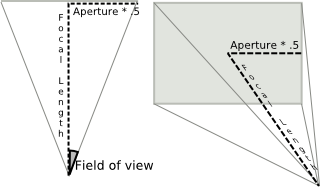
現実世界のカメラをHoudiniのカメラに関連付けるのに使う基本的な数式がいくつかあります。以下にそれを載せています。
| 変数 | 定義 | デフォルト値 |
|---|---|---|
| fovx | Xの視界 | - |
| fovy | Yの視界 | - |
| apx | Xの絞り | 41.4214 |
| apy | Yの絞り | - |
| focal | Focal Length:焦点距離(レンズのズーム) | 50 |
| resx | Xのピクセル解像度 | 320 |
| resy | Yのピクセル解像度 | 243 |
| asp | ピクセル比(幅/高さ) | 1 |
次の3つのキーの関係性:
fovx = 2 * atn( (apx/2) / focal ) tan(fovy/2) = (apy/2) / focal apx/apy = (resx * asp) / resy
上記から導き出せる便利な方程式:
apy = (resy*apx) / (resx*asp) fovy = 2*atan( (apy/2) / focal )
上記のHoudiniのデフォルト値を使った解:
fovx = 2*atan( ( apx / 2 ) / focal ) = 2*atan( ( cam1/aperture / 2 ) / cam1/focal ) = 2*atan( ( 41.4214 / 2 ) / 50 ) = 45˚ apy = (resy * apx) / (resx * asp) = (243 * 41.4214) / (320 * 1) = 31.454376 fovy = 2*atan( (apy/2) / focal ) = 2*atan( (31.454376 / 2) / 50 ) = 34.9213˚
fovxはresx、resy、aspectとは関係有りませんが、fovyとは関係があります。
1単位のグリッドを焦点距離の位置でカメラに取り付ければ、これを確認することができ、X方向の単位の数は正確に絞りと等しくなります。Y方向のグリッドの数(apy)は、resx、resy、aspectに依存しています。