| On this page |
概要 ¶
このノードは、インポートしたジオメトリ上のアトリビュートを使用してベクトルフィールドを定義し、そのベクトルフィールドを 使用して、ダイナミクスオブジェクトを“押す”ことができます。
動かす各オブジェクト/ボクセルに対して、ノードは、フォースジオメトリ内の一番近いポイント/ボクセルのフォースを適用します。
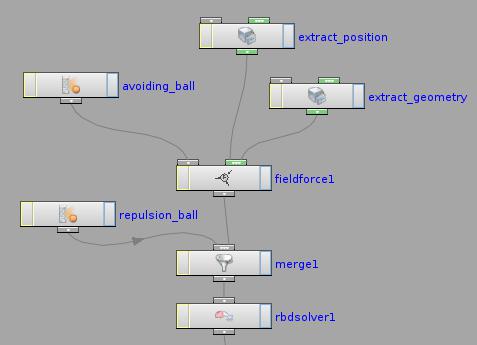
例えば、以下のサンプルでは、1個のボールに他のボールを突き放す“repulsor”フィールド用のジオメトリを用意しています。
Tip
他のシミュレーションタイプから抽出したフィールドを使用して、RBDオブジェクトを押し払いたいなら、 フィールドフォースを使用するよりも、最適でインタラクティブな別の手段 が存在することがあります。
-
FLIP流体シミュレーションは、フォースフィードバックを有効にした時に、RBDシミュレーションオブジェクトに非常に効率的に作用します。
-
Pyroシミュレーションに関しては、ソルバをMultigridからPCGに変更して、再度フィードバックオプションを有効にします。
-
Pumpオブジェクトを使用すれば、VelocityをFLIP流体またはPyro/Smokeシミュレーションに注入することができます。
(Pumpを使用すれば、Field Forceに送り込むためのVelocityフィールドを作成することもできます。)
How to ¶
| To... | Do this |
|---|---|
フィールドを形成するジオメトリをセットアップする |
ジオメトリオブジェクト内にジオメトリを作成し、各ポイントに、フォース方向を意味するベクトルを含んだアトリビュートジオメトリを設定します。 デフォルトでは、 あるいは、ジオメトリオブジェクト内にベクトルボリュームを作成して、そのボリュームをフォースベクトルのソースとして使用することができます。 また、スカラー(ボクセル毎の1つの値)ボリュームを使用することもできます。その場合、フィールドフォースは、その値の 勾配 をフォース方向として使用します。 |
フォースジオメトリをField Forceノードに取り付ける |
Field Forceノードを作成して、そのノードをそのフォースから影響を受けるオブジェクト/ソルバのストリームに接続します。
(必要なジオメトリが既にDOP Network内にあれば、 ソースジオメトリが移動する場合、フォースポジションがジオメトリポジションに追従するように、ジオメトリのPositionデータを取り付けることも必要です。
アニメーションするオブジェクトに関しては、 |
速度と精度のどちらかを選択する |
Sampling mode 設定によって、オブジェクトのシミュレーションの速度とフォースの効果の精度のバランスを決めることができます。 Sampling Modeのヘルプを参照してください。 |
パラメータ ¶
Data Options ¶
Force Attribute
取り付けられたジオメトリサブデータ上のフォース値を持つアトリビュートの名前を設定します。 これは、3つのfloatまたはvectorアトリビュートでなければなりません。
Scale Force
ジオメトリから抽出された Force Attribute の値が、この値で乗算されます。
Torque Attribute
取り付けられたジオメトリサブデータ上のTorque(回転モーメント)値を持つアトリビュートの名前を設定します。 これは、3つのfloatまたはvectorアトリビュートでなければなりません。
Scale Torque
ジオメトリから抽出された Torque Attribute の値が、この値で乗算されます。
Use Max Distance
このオプションをオンにすると、オブジェクトがジオメトリポイントのどれかから指定した距離内にある場合にのみ、このフォースノードがForceまたはTorqueを適用します。
Max Distance
ジオメトリ上の一番近いポイントが、この最大距離より遠い時、ForceまたはTorqueは適用されません。 このテストは、 Use Max Distance オプションが有効な時だけ実行されます。
Treat As Wind
Velocityフィールドに比例してフォースを適用するのではなく、Drag(抵抗)をVelocityフィールドに適用することで、それをRest-Velocity(安定Velocity)にします。 これは、Velocityフィールドに一致するまでオブジェクトを加速させます。
Sampling Mode
“Default”は、“Circle”と同じです。
Point
フォースジオメトリの一番近いポイントをサンプリングして、オブジェクトに適用するフォースを決めます。 これが最も高速なオプションで、放射フォースと単純なオブジェクトに適しています。 その結果は、より精度の高いオプションと比べても特に目立った違いはありません。
Circle
フォースジオメトリの断面をサンプリングするので、シミュレーションが遅くなりますが、忠実性が高くなります。 フォースジオメトリが細かくて、フォースが変化する場合には、このオプションが適しています。
例えば、よく見ると微妙に凸凹して荒れた向きのフォースを使って複雑なサーフェスに衝突RBDオブジェクトを落とす場合には、Circleモードを使用してください。
Sphere
フォースジオメトリのSDFをサンプリングします。これは、最も遅いオプションですが、最も精度が高いです。
Guide Options ¶
Show Guide Geometry
このフォースのビューポートでのガイドジオメトリの表示を有効にします。そのガイドジオメトリは、フォースジオメトリ上の各ポイントを始点にしたラインで構成され、forceやtorqueのアトリビュート値を示します。
ガイドジオメトリは、Geometryがサブデータとして使用されている時のみ表示されます。 Vector FieldまたはScalar Fieldsが使用されている場合、Vector Field VisualizationまたはScalar Field Visualizationを使用することで、ガイドジオメトリを追加することができます。
Show Force Vectors
このオプションをオンにすると、ジオメトリ上のforceアトリビュートの値がラインで表示されます。
Scale Force Vectors
forceアトリビュートの値は、表示前に、このパラメータの値でスケールされます。
Note
Force Scale パラメータを使用しても、表示用のforceアトリビュートの値をスケールすることができます。
Force Vector Color
フォースベクトルの表示に使用するカラー。
Show Torque Vectors
このオプションをオンにすると、ジオメトリ上のtorqueアトリビュートの値がラインで表示されます。
Scale Torque Vectors
torqueアトリビュートの値は、表示前に、このパラメータの値でスケールされます。
Note
Torque Scale パラメータを使用しても、表示用のtorqueアトリビュートの値をスケールすることができます。
Torque Vector Color
Torque(回転モーメント)ベクトルの表示に使用するカラー。
Sampling Mode
空間上にフォースをサンプリングする方法を制御します。この挙動はソルバ応じて変わります。 流体ソルバは常にボクセル単位でサンプリングしますが、RBDソルバは、サンプリングを重心だけ、 サーフェスだけ、または全体のボリュームのどちらかに切り替えることができます。
Default
各フォースタイプには、独自の考えの最適なサンプリングモードがあります。 均一なフォースに関しては、例えば、1個のサンプルだけを取得するので、Pointと同じです。 しかし、空間上で変化する見込みのあるField Forceに関しては、 Treat as Wind がFalseの時は、 Sphereサンプリングモードがデフォルトです。そうでないなら、Circleサンプリングモードが使われます。
Point
オブジェクトの中心で単一フォースを評価し、この値がオブジェクトの一定フォースとして扱います。 これは非常に効率的な方法ですが、微妙な差異の調整が不可です。例えばオブジェクトのスピンを開始させる中心をオフセットしたファン。
Circle
オブジェクトのサーフェス上でフォースを評価します。 これは、オブジェクトの向きに応じて不均一に適用したい風などのフォースで役に立ちます。
Sphere
オブジェクトのボリュームの至るところでフォースを評価します。これは、オブジェクトの形状を順守したいフォースで役に立ちます。 サンプル数はRBDオブジェクトのSDF解像度に比例しますが、非常に処理が重くなる可能性があります。
Parameter Operations
各データオプションパラメータには、それに関連するそのパラメータの動作方法を指定するメニューがあります。
Use Default
Default Operationメニューの値を使用します。
Set Initial
このデータを作成した時だけ、このパラメータの値を設定します。 それ以降のすべてのタイムステップ上では、このパラメータの値は変更されません。 これは、ポジションやVelocityのような初期状態のセットアップに役に立ちます。
Set Always
このパラメータの値を常に設定します。これは、特定のキーフレーム値が時間にわたって必要な時に役に立ちます。 これは、時間にわたってオブジェクトの位置をキーフレームしたり、ジオメトリが変形する場合にタイムステップ毎に SOPのジオメトリを取得するのに役に立ちます。
この設定をパラメータ値に対してローカル変数と合わせて使用することで、時間にわたって値を修正することもできます。
例えば、X Positionでは、$tx + 0.1のようなエクスプレッションがタイムステップ毎にオブジェクトを右に0.1ユニットずつ動かします。
Set Never
このパラメータの値をまったく設定しません。 このオプションは、このノードを使って1番目の入力に接続された既存のデータを修正する時に非常に役に立ちます。
例えば、![]() RBD State DOPでオブジェクトの質量しかアニメーションさせたくない場合、
Set Never オプションを Mass 以外のすべてのパラメータで使用し、 Mass パラメータには Set Always を使用します。
RBD State DOPでオブジェクトの質量しかアニメーションさせたくない場合、
Set Never オプションを Mass 以外のすべてのパラメータで使用し、 Mass パラメータには Set Always を使用します。
Default Operation
Use Default に設定した Operation メニューのパラメータに対して、このパラメータが、使用するオペレーションを制御します。
このパラメータは、 Parameter Operations メニューと同じメニューオプションと意味を持ちますが、 Use Default の選択がありません。
Data Sharing
このノードで作成されるデータをシミュレーション内の複数のオブジェクト間で共有する方法を制御します。
データ共有はシミュレーションのメモリ使用量を大幅に削減することができますが、 その代わりにすべてのオブジェクトがまったく同じデータと関連している必要があります。
Share Data Across All Time
このノードは、全体のシミュレーションに対して単一のデータだけを作成します。 このデータは、最初に必要になった時に作成されるので、エクスプレッションは最初のオブジェクトにだけ評価されます。
それ以降のすべてのオブジェクトには、最初のオブジェクトのエクスプレッションで計算された値と同じ値のデータが追加されます。 それらのエクスプレッションはデータと一緒に保存されないので、データが作成された後は、それらのエクスプレッションを評価することができないこと に注意するのが重要です。
エクスプレッションはデータを作成する前にDOPノードで評価されます。
時間を含んだエクスプレッションもこの単一のデータが作成された時だけ評価されます。
このオプションは、時間軸で変化しないデータに適していて、![]() Gravity DOPなどのすべてのオブジェクトに共通です。
Gravity DOPなどのすべてのオブジェクトに共通です。
Share Data In One Timestep
シミュレーションのタイムステップ毎に新しいデータが作成されます。 タイムステップ内では、すべてのオブジェクトが同じデータを追加します。 そのため、時間を含んだエクスプレッションは、このデータを時間にわたってアニメーションさせますが、 そのオブジェクトを含んだエクスプレッションは、データが追加された1番目のオブジェクトに対してだけ評価されます。
このオプションは、時間軸で変化しないデータに適していますが、![]() Fan Force DOPなどのすべてのオブジェクトに共通で、
ファンは時間軸で移動または回転します。
Fan Force DOPなどのすべてのオブジェクトに共通で、
ファンは時間軸で移動または回転します。
Activation
このノードが、指定したタイムステップで特定のオブジェクトに対して何でもするべきか決めます。 このパラメータがエクスプレッションであれば、(たとえデータ共有が有効でも)オブジェクト毎にパラメータが評価されます。
パラメータがゼロ以外の値に評価されれば、データがそのオブジェクトに追加されます。 パラメータがゼロに評価されれば、データが追加されず、このノードで以前追加されたデータが削除されます。
Group
オブジェクトコネクタをこのノードの1番目の入力に接続した時、このパラメータを使って、 このノードから影響を受けるそれらのオブジェクトのサブセットを選択することができます。
Data Name
オブジェクトまたは他のデータにデータを追加するために使用する名前を意味します。 Data Name に“/”(または複数)を含めれば、それはサブデータ内側に移動することを意味します。
例えば、![]() Fan Force DOPのデフォルトの Data Name は“Forces/Fan”です。
これは、“Forces”という既存のデータに“Fan”という名前のデータを追加します。
“Forces”というデータが存在しなければ、単なるコンテナデータが作成されて、そこに“Fan”サブデータが追加されます。
Fan Force DOPのデフォルトの Data Name は“Forces/Fan”です。
これは、“Forces”という既存のデータに“Fan”という名前のデータを追加します。
“Forces”というデータが存在しなければ、単なるコンテナデータが作成されて、そこに“Fan”サブデータが追加されます。
異なるデータは、それらを使用する名前に対して異なる要件を持ちます。 非常に稀な場合を除いて、デフォルト値を使用してください。 いくつかの例外は、特定のデータまたは特定のタイプのデータを利用するソルバで説明します。
Unique Data Name
このパラメータを有効にすると、このノードで作成されるデータが既存データを上書きしないように 固有な名前で Data Name パラメータの値を修正します。
このパラメータをオフにすると、同じ名前の2つのデータを追加すると、2番目のデータが1番目のデータを置換します。 各タイプの挙動が必要な場合があります。
オブジェクトにいくつかの![]() Fan Forcesを吹き付けたい時に、各ファンが前のファンを上書きしないように、
個々のファンの Data Name を変更して名前の衝突を回避するよりも、 Unique Data Name の機能を使用する方が簡単です。
Fan Forcesを吹き付けたい時に、各ファンが前のファンを上書きしないように、
個々のファンの Data Name を変更して名前の衝突を回避するよりも、 Unique Data Name の機能を使用する方が簡単です。
一方で、オブジェクトに既に![]() RBD Stateデータが追加されていることを知っていれば、このオプションをオフにすることで、
新しい
RBD Stateデータが追加されていることを知っていれば、このオプションをオフにすることで、
新しい![]() RBD Stateデータが既存データを上書きすることができます。
RBD Stateデータが既存データを上書きすることができます。
入力 ¶
First Input
このオプションの入力を使えば、このノードで修正するシミュレーションオブジェクトを制御することができます。 この入力に接続されていて Group パラメータフィールドに一致するオブジェクトが修正されます。
この入力を接続しなかった場合、このノードを Apply Data ノードと併用して使用するか、または他のデータノードの入力として使用することができます。
All Other Inputs
このノードに複数の入力コネクタがあれば、他のデータノードを取り付けて、このノードで作成されるデータのモディファイアとして動作させることができます。
意味のあるサブデータの特定のタイプは、ノードからノードへ変化します。
意味があるように取り付け可能な利用可能なデータノードのリストを確認するには、入力コネクタを![]() クリックします。
クリックします。
出力 ¶
First Output
この出力のオペレーションは、このノードに接続している入力に依存します。 オブジェクトストリームがこのノードの入力であれば、その出力も入力と同じオブジェクトを含んだオブジェクトストリーム(しかし、取り付けられたこのノードのデータを持ちます)です。
オブジェクトストリームをこのノードに接続しなかった場合、その出力はデータ出力になります。
このデータ出力を![]() Apply Data DOPに接続したり、他のデータノードのデータ入力に直接接続することで、
このノードのデータをオブジェクトや他のデータに取り付けることができます。
Apply Data DOPに接続したり、他のデータノードのデータ入力に直接接続することで、
このノードのデータをオブジェクトや他のデータに取り付けることができます。
ローカル変数 ¶
channelname
このDOPノードはData Optionsページの各チャンネルとパラメータに対して、チャンネルと同じ名前のローカル変数を定義します。 例えば、ノードにPositionのチャンネル(positionx、positiony、positionz)とオブジェクト名のパラメータ(objectname)があるとします。
そのノードには、positionx、positiony、positionz、objectnameの名前を持つローカル変数も存在します。これらの変数は、そのパラメータに対する前の値を評価します。
この前の値は、処理されているオブジェクトに追加されたデータの一部として常に保存されています。 これは、本質的には以下のようなdopfieldエクスプレッション関数のショートカットです:
dopfield($DOPNET, $OBJID, dataName, "Options", 0, channelname)
データがまだ存在しないなら、ゼロの値または空っぽの文字列が返されます。
DATACT
この値は、現在のデータが作成されたシミュレーション時間(変数STを参照)です。 このノードが新しいデータを作成せずに既存データを変更していれば、この値は現在のシミュレーション時間と同じにはなりません。
DATACF
この値は、現在のデータが作成されたシミュレーションフレーム(変数SFを参照)です。 このノードが新しいデータを作成せずに既存データを変更していれば、この値は現在のシミュレーションフレームと同じにはなりません。
RELNAME
この値は、データがリレーションシップ(例えば、Constraint Anchor DOPがConstraint DOPの2番目、3番目、4番目の入力に接続されている時)に追加されている時だけ設定されます。
この場合では、この値は、データが追加されているリレーションシップの名前に設定されます。
RELOBJIDS
この値は、データがリレーションシップ(例えば、Constraint Anchor DOPがConstraint DOPの2番目、3番目、4番目の入力に接続されている時)に追加されている時だけ設定されます。
この場合では、この値は、データが追加されているリレーションシップのAffected Objectsすべてに対するオブジェクトIDをスペース区切りにしたリストの文字列に設定されます。
RELOBJNAMES
この値は、データがリレーションシップ(例えば、Constraint Anchor DOPがConstraint DOPの2番目、3番目、4番目の入力に接続されている時)に追加されている時だけ設定されます。
この場合では、この値は、データが追加されているリレーションシップのAffected Objectsすべてに対するオブジェクト名をスペース区切りにしたリストの文字列に設定されます。
RELAFFOBJIDS
この値は、データがリレーションシップ(例えば、Constraint Anchor DOPがConstraint DOPの2番目、3番目、4番目の入力に接続されている時)に追加されている時だけ設定されます。
この場合では、この値は、データが追加されているリレーションシップのAffector Objectsすべてに対するオブジェクトIDをスペース区切りにしたリストの文字列に設定されます。
RELAFFOBJNAMES
この値は、データがリレーションシップ(例えば、Constraint Anchor DOPがConstraint DOPの2番目、3番目、4番目の入力に接続されている時)に追加されている時だけ設定されます。
この場合では、この値は、データが追加されているリレーションシップのAffector Objectsすべてに対するオブジェクト名をスペース区切りにしたリストの文字列に設定されます。
ST
この値は、ノードが評価されるシミュレーション時間です。
この値は、変数Tで表現される現在のHoudiniの時間と同じではなく、![]() DOP Networkの Offset Time と Time Scale のパラメータの設定に依存しています。
DOP Networkの Offset Time と Time Scale のパラメータの設定に依存しています。
この値は、シミュレーションの開始時間がゼロになるようになっています。つまり、シミュレーションの最初のタイムステップをテストする時は、$T == 0や$FF == 1を使うのではなくて、$ST == 0のようなテストを使うのがベストです。
SF
この値は、ノードが評価されるシミュレーションフレーム(正確には、シミュレーションタイムステップ番号)です。
この値は、変数Fで表現される現在のHoudiniのフレーム番号と同じではなく、![]() DOP Networkパラメータの設定に依存しています。代わりに、この値は、シミュレーション時間(ST)をシミュレーションタイムステップサイズ(TIMESTEP)で割算した値と同じです。
DOP Networkパラメータの設定に依存しています。代わりに、この値は、シミュレーション時間(ST)をシミュレーションタイムステップサイズ(TIMESTEP)で割算した値と同じです。
TIMESTEP
この値は、シミュレーションタイムステップのサイズです。この値は、1秒あたりのユニットで表現した値をスケールするのに役に立ちますが、タイムステップ毎に適用されます。
SFPS
この値は、TIMESTEPの逆数です。シミュレーション時間の1秒あたりのタイムステップ数です。
SNOBJ
これはシミュレーション内のオブジェクトの数です。![]() Empty Objectノードなどのオブジェクトを作成するノードでは、この値は、オブジェクトが評価される度に値が増えます。
Empty Objectノードなどのオブジェクトを作成するノードでは、この値は、オブジェクトが評価される度に値が増えます。
固有のオブジェクト名を確保する良い方法は、object_$SNOBJのようなエクスプレッションを使うことです。
NOBJ
この値は、このタイムステップ間で現行ノードで評価されるオブジェクトの数です。 この値は、多くのノードがシミュレーション内のオブジェクトすべてを処理しないので、SNOBJとは異なります。
この値は、ノードが各オブジェクトを続けて処理(例えば、![]() Group DOP)しないなら0を返します。
Group DOP)しないなら0を返します。
OBJ
この値は、ノードで処理される特定のオブジェクトのインデックスです。 この値は、指定したタイムステップで常にゼロからNOBJ-1まで実行されます。 この値は、OBJIDやOBJNAMEなどのシミュレーション内の現行オブジェクトを識別せず、現在の処理順でのオブジェクトの順番を識別します。
この値は、オブジェクト毎に乱数を生成するのに役に立ちます。他には、処理別にオブジェクトを2,3のグループに分けるのに役に立ちます。
この値は、ノードがオブジェクトを続けて処理(例えば、![]() Group DOP)しないなら-1を返します。
Group DOP)しないなら-1を返します。
OBJID
この値は、処理されているオブジェクトの固有のオブジェクトIDです。 すべてのオブジェクトは、すべての時間のシミュレーション内のオブジェクトすべてで固有な整数値が割り当てられています。たとえオブジェクトが削除されても、そのIDは決して再利用されません。
オブジェクトIDは、指定したオブジェクトを固有なものと識別するために常に使われています。 オブジェクトIDは、オブジェクト毎に別々の処理をさせたいシミュレーションで非常に役に立ちます。 オブジェクト毎に固有の乱数を生成するのにも使われます。
この値は、dopfieldエクスプレッション関数を使って、オブジェクトの情報を検索するのにベストな方法です。
この値は、ノードがオブジェクトを続けて処理(例えば、![]() Group DOP)しないなら-1を返します。
Group DOP)しないなら-1を返します。
ALLOBJIDS
この文字列には、現行ノードで処理されているオブジェクトすべての固有のオブジェクトIDをスペース区切りにしたリストが含まれています。
ALLOBJNAMES
この文字列には、現行ノードで処理されているオブジェクトすべての名前をスペース区切りにしたリストが含まれています。
OBJCT
この値は、現行オブジェクトが作成された時のシミュレーション時間(変数STを参照)。
そのため、オブジェクトが現在のタイムステップで作成されたかどうかチェックするには、$ST == $OBJCTのエクスプレッションが常に使われます。
この値は、ノードがオブジェクトを続けて処理(例えば、![]() Group DOP)しないなら0を返します。
Group DOP)しないなら0を返します。
OBJCF
この値は、現行オブジェクトが作成された時のシミュレーションフレーム(変数SFを参照)。
この値は、OBJCT変数にdopsttoframeエクスプレッションを使ったものと等価です。この値は、ノードがオブジェクトを続けて処理(例えば、![]() Group DOP)しないなら0を返します。
Group DOP)しないなら0を返します。
OBJNAME
これは、処理されているオブジェクトの名前を含む文字列の値です。
オブジェクト名は、シミュレーション内で固有であることが保証されていません。 しかし、オブジェクト名が固有になるように注意して名前を付けていれば、オブジェクトの識別は、オブジェクトIDよりも、オブジェクト名を指定するほうが簡単です。
オブジェクト名は、同じ名前を持つオブジェクトの数を仮想グループとして扱うこともできます。
“myobject”という名前のオブジェクトが20個あれば、DOPのActivationフィールドにstrcmp($OBJNAME, "myobject") == 0を指定すると、DOPがその20個のオブジェクトのみを操作します。
この値は、ノードがオブジェクトを続けて処理(例えば、![]() Group DOP)しないなら空っぽの文字列を返します。
Group DOP)しないなら空っぽの文字列を返します。
DOPNET
これは、現在のDOP Networkのフルパスを含む文字列です。 この値は、ノードを含むDOP Networkのパスを知りたりDOPサブネットのデジタルアセットで非常に役に立ちます。
Note
ほとんどのダイナミクスノードには、そのノードのパラメータと同じ名前のローカル変数があります。
例えば、![]() Positionノードでは、以下のエクスプレッションを記述することができます:
Positionノードでは、以下のエクスプレッションを記述することができます:
$tx + 0.1
これはオブジェクトをタイムステップ毎にX軸方向に0.1単位分移動させます。
Examples ¶
FieldForceSmoke Example for Field Force dynamics node
SmokeシミュレーションからVelocityフィールドを抽出して、それをPOPシミュレーションの風のフォースとして使用します。
FromRBD Example for Field Force dynamics node
このサンプルでは、他のActive RBDオブジェクトをField Force DOPのソースとして使用する方法を説明しています。 2つのボールが立方体内を跳ね返り、それらのボールの1つが、ジオメトリに記録されたForceの値に応じて片方のボールを跳ね返すように設定しています。
SimpleField Example for Field Force dynamics node
このサンプルでは、Field Force DOPの使い方を説明しています。 RBDオブジェクトのグループが最初にフィールドに引き寄せられて、フィールドを通過して引き離されます。