| On this page |
概要 ¶
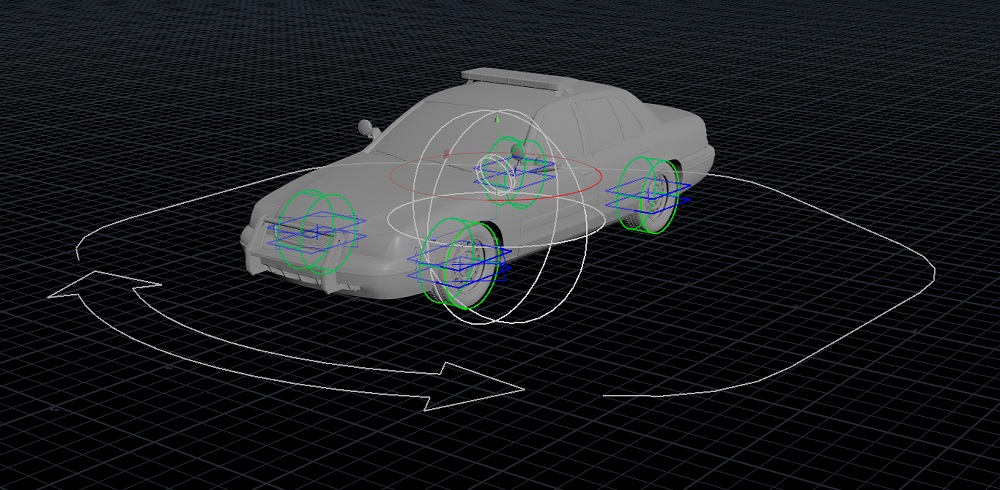
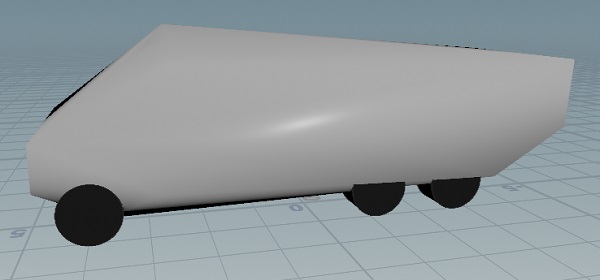
![]() RBD Car Rig SOPは、指向性のあるカージオメトリを、サスペンションとモーターの拘束を持つ運転可能なダイナミック自動車リグに変換します。
これはどの入力ジオメトリにも適応することができ、4つのビルトインのホイールレイアウトを持ちます(ホイールレイアウトを完全にカスタマイズする5つ目のオプションがあります)。
ホイールとサスペンションのプロパティは、グローバルで、軸単位で、個々のホイールに設定することができます。
さらには、ホイールのキャンバー、タイヤの摩擦と弾力性、サスペンションの移動/剛性/減衰を調整することもできます。
RBD Car Rig SOPは、指向性のあるカージオメトリを、サスペンションとモーターの拘束を持つ運転可能なダイナミック自動車リグに変換します。
これはどの入力ジオメトリにも適応することができ、4つのビルトインのホイールレイアウトを持ちます(ホイールレイアウトを完全にカスタマイズする5つ目のオプションがあります)。
ホイールとサスペンションのプロパティは、グローバルで、軸単位で、個々のホイールに設定することができます。
さらには、ホイールのキャンバー、タイヤの摩擦と弾力性、サスペンションの移動/剛性/減衰を調整することもできます。
カージオメトリ ¶
あなた自身のカージオメトリを使用することも、コンテンツライブラリからトラックのFBXファイルをダウンロードすることもできます。
これをHoudiniで![]() RBD Car Rig SOPに使用することで、運転可能なRBD車両に変換することができます。
この説明では、そのトラックのジオメトリを使用しますが、このメソッドはどの車両にも適用することができます。
RBD Car Rig SOPに使用することで、運転可能なRBD車両に変換することができます。
この説明では、そのトラックのジオメトリを使用しますが、このメソッドはどの車両にも適用することができます。

リグのセットアップ ¶
-
コンテンツライブラリからトラックのFBXファイルをインポートするか、または、あなたの車を使用します。
-
それを
 RBD Car Rig SOPの入力に接続します。
RBD Car Rig SOPの入力に接続します。 -
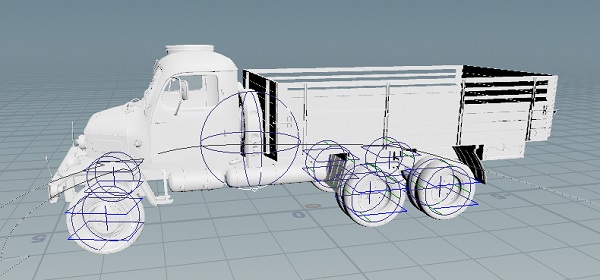
Wheels Group パラメータには、ホイールのプリミティブグループを設定し、 Configure タブの Wheel Layout パラメータには、車のホイールレイアウトのタイプを選択します。
デモのトラックでは、 Wheels Group パラメータに
@wheels=1を設定し、 Wheel Layout パラメータには 3 Axles を選択します。Note
別のホイールレイアウトを選択する場合(例えば、3軸トラックに 4 Wheels を選択する場合)、後輪を4本の小さいホイールの代わりに2本の大きなホイールとしてグループ化します。
Tip
それよりも多いホイールがある場合は、 Wheel Layout パラメータには Custom を選択し、 Wheels セクションの Number of Wheels パラメータの+ボタンをクリックして、手動でホイールの数を追加します。 そして、各 Wheel Group パラメータにそれぞれのホイールのプリミティブグループを割り当てて、 Front 、 Back 、 Left 、 Right などを設定することで、ホイールを個別にセットアップすることができます。
-
オプションで Steering Wheel Group パラメータを設定します。
デモのトラックには、ステアリングホイール(ハンドル)がありませんが、ステアリングホイールがある場合には、このパラメータは、RBDシミュレーションに寄与することなく、ステアリング入力に応じて、ステアリングホイールジオメトリを自動的に回転させます。
-
Ignore Group パラメータには、車体のプロキシコリジョンジオメトリを生成する時に無視するプリミティブグループを設定します。通常では、ここには、突出していて車体全体のボリュームを大幅に変えてしまうアンテナなどを含めます。
-
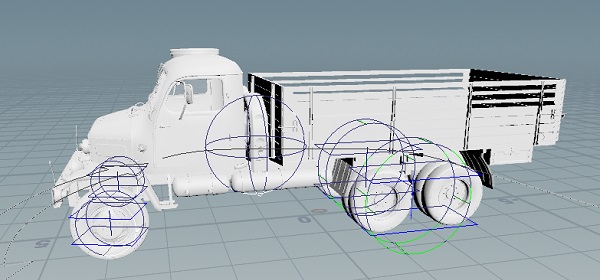
Drive Mode パラメータには、自動車が Front Wheel Drive (前輪駆動)、 Rear Wheel Drive (後輪駆動)、 All Wheel Drive (すべての車輪が駆動)のどれなのかを指定します。 このデモのトラックの場合、 Front Wheel Drive を使用します。すると、駆動するホイールが緑色のビジュアライザで表現されます。 これは、自動車を走らせる時に取り付けられるモーターの位置を決めます。
出力 ¶
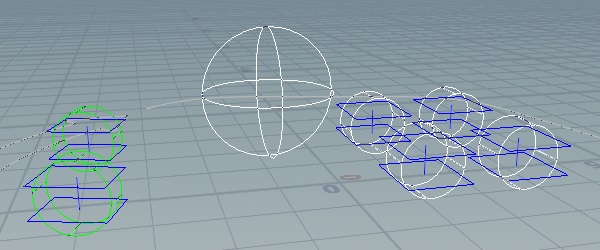
1番目の出力が高解像度ジオメトリ(元のジオメトリ)で、ホイール選択に基づいてパックプリミティブにパック化されています。 この場合では、パックプリミティブが7つあります: 6本のホイールと1台のトラックの車体。

3番目の出力がプロキシジオメトリです。この場合では、6個の円柱パックプリミティブ(ホイール毎に1個)と車体が凸ハルで包まれた1個のパックプリミティブです。
Note
これらは、RBD Material Fractureで得られるような高解像度ジオメトリと低解像度ジオメトリと同じです。
2番目の出力は、拘束ですが、このノードがホイールの回転(操縦)とサスペンション(上下の移動)を制御する拘束をセットアップしてくれるで、手動でセットアップする必要はありません。
リグの構成 ¶
| To... | Do this |
|---|---|
|
元の高解像度ジオメトリを表示する |
Show Geometry チェックボックスを有効にします。 |
|
リグガイドを表示する |
Show Guides チェックボックスを有効にします。 |
|
プロキシジオメトリを表示する |
Show Body Proxy Geo チェックボックスを有効にします。 |
|
車両の重心を変更する |
Configure タブの Center of Mass パラメータを使用するか、または、ビューアステートのハンドルを使用して、車体の高さと長さから重心を変更します。 例えば、トラックの前方にはエンジンが搭載されているため通常では空っぽの荷台よりも重いです。 重心を少し前方に動かすと、よりリアルな挙動になります。 Tip 重心が高いほどトラックは旋回時に横転しやすくなりますが、重心を低くすることで横転を防ぐことができます。 |
|
車両のコーナリングの挙動を改善する |
Ackermann Steering Angle パラメータを上げます。 これを0に設定すると、両方のホイールがまったく同じ量だけ回転します。 これを上げると、外側ホイールは内側ホイールよりも少なく回転するようになります。 これによって、2本のホイールが円弧を描く距離が異なるのでコーナリングの挙動が改善されます。
|
|
弾力性のある/バネっぽいサスペンションを作成する |
Suspension セクションで、 Travel パラメータを上げ、 Stiffness と Damping のパラメータを下げます。 Travel パラメータは、サスペンションが上下に動く可動範囲を制御し、 Stiffness と Damping のパラメータは、サスペンションの剛性を制御します。 |
|
運転中の滑りを回避する |
Motors セクションの Differential パラメータを Locked または Limited Slip に変更します。 |
|
タイヤが地面に接する箇所に少しの圧縮を加える |
Wheel Scale パラメータを下げて、ホイールのプロキシジオメトリを実際のサイズよりも少し小さくします。 |
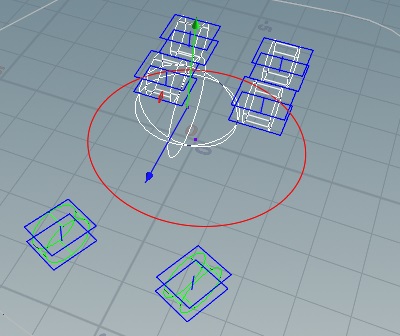 Ackermann Steering Angleが0
Ackermann Steering Angleが0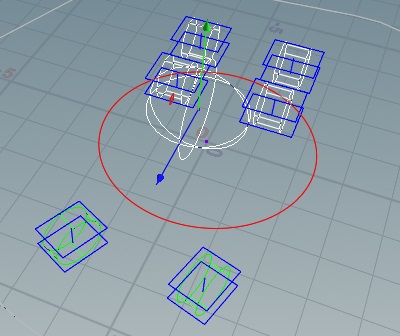 Ackermann Steering Angleが0.75
Ackermann Steering Angleが0.75リグの運転 ¶
RBD Car Rigツールのビューアステートは、自動車を運転するコントロールが備わっています。 また、車両の現行速度と Drive Mode を表示することもできます。
W - 加速する
S - 減速する
A - 左に曲がる
D - 右に曲がる
E - ブレーキ
G - ハンドブレーキ
これらのキーを押すと、 Configure タブの Acceleration Profile ランプに応じて、小数単位でその量が増減します。
Note
ゲームコントローラまたはハンドルをお持ちの場合は、![]() Game Pad CHOPを使用することで、これらの運転パラメータコントロールをオーバーライドすることができます。
Game Pad CHOPを使用することで、これらの運転パラメータコントロールをオーバーライドすることができます。
| To... | Do this |
|---|---|
|
ビューアステートキーを使用して運転セッションを記録する |
コントロールを使用すると、キーフレームが追加されます。 |
|
速度の単位を変更する |
Speed パラメータの右側にあるドロップダウンメニューから km/h や mph を選択します。 |
|
ビューアステートでホイールのガイドジオメトリを表示する |
HUD Scale パラメータを有効にします。 これによって、ホイールで起きている操縦とブレーキが視覚的に表現され、使用している Drive Mode のインジケータも表示されます。 |
次のステップ ¶
RBD Car Rigをセットアップしたら、 Quick Setups ドロップダウンメニューを使用して RBD Solver と Add Cameras を選択します。
RBD Solverオプション ¶
RBD Solver オプションは、ネットワーク内にいくつかのノードを作成します。
これは、上流で自動車を移動させなくても自動車を開始位置に移動させることができるRBD Transformノードを追加します。
その後に、これが![]() RBD Bullet Solverに接続されます。
このソルバでは、地面の追加だけでなく、
RBD Bullet Solverに接続されます。
このソルバでは、地面の追加だけでなく、![]() RBD Car Deformerで使用されるいくつかの Properties も簡単に追加することができます。
詳細は、RBD Car Deformの使い方を参照してください。
RBD Car Deformerで使用されるいくつかの Properties も簡単に追加することができます。
詳細は、RBD Car Deformの使い方を参照してください。
また、 RBD Solver オプションは、追跡カメラ用のアトリビュートもセットアップします。 Quick Setups メニューから Add Cameras オプションを選択することで、カメラを追加することができます。
Add Camerasオプション ¶
このオプションは、シーンに3台のカメラを追加します。これらのカメラには、追跡カメラ用アトリビュートを設定したノードを参照したNullノードが親として接続されます。 BirdsEye (トップダウンビュー)、 Cinematic 、 Cockpit (ハンドルを後ろからのビュー)のカメラを切り替えることができます。
Dynamic Follow Pathオプション ¶
このオプションは、SOPレベルでモーションを表示する![]() RBD Car Follow Path SOPを追加します。
すべてのパラメータがDOPレベルの
RBD Car Follow Path SOPを追加します。
すべてのパラメータがDOPレベルの![]() RBD Car Follow Pathノードでチャンネル参照されています。
これによって、ほぼすべてのパラメータをSOPレベルで調整することができます。
ダイナミクス固有のパラメータを編集したい場合にのみDOPに入る必要があります。
RBD Car Follow Pathノードでチャンネル参照されています。
これによって、ほぼすべてのパラメータをSOPレベルで調整することができます。
ダイナミクス固有のパラメータを編集したい場合にのみDOPに入る必要があります。
カーブは単純に![]() RBD Car Follow Pathノードの4番目の入力に接続します。
Curve Position パラメータを使用してそのカーブ沿いのポイントにキーフレームを打つことで、その自動車をそのカーブに沿って動かすことができます。
自動車はカーブの長さに沿って0から1の間でアニメーションし、これがフレーム範囲を意味します。
RBD Car Follow Pathノードの4番目の入力に接続します。
Curve Position パラメータを使用してそのカーブ沿いのポイントにキーフレームを打つことで、その自動車をそのカーブに沿って動かすことができます。
自動車はカーブの長さに沿って0から1の間でアニメーションし、これがフレーム範囲を意味します。
詳細は、RBD Car Follow Pathの使い方を参照してください。