In Houdini you use dynamics networks to create simulations. You create simulation objects and apply one or more solvers to the objects. Houdini has objects and solvers for many different types of simulation, such as cloth, rigid bodies, wires, and fluids. There are also specialized solvers for integrating dynamics with other parts of Houdini, such as script solvers, geometry solvers, particle solvers, and Python solvers.
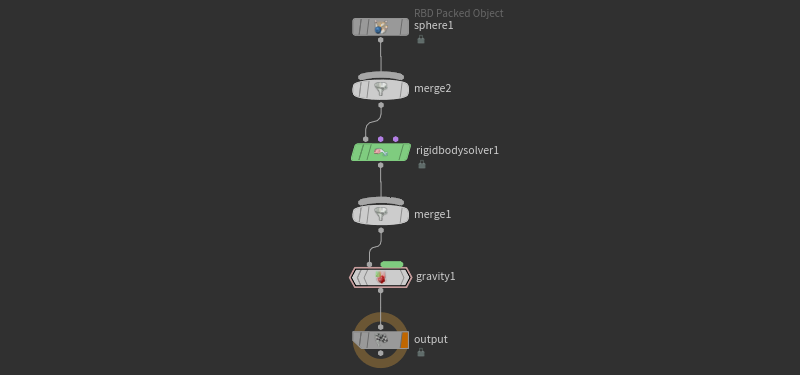
The most basic dynamics setup is a single simulation object wired to a solver, with a force applied. To create such a setup, you can use the Rigid Bodies shelf tools, e.g. the ![]()
![]() RBD Hero Object.
RBD Hero Object.
Dynamic simulations can also have constraints, which constrain one object’s position based on another object’s position. For example, a spring constraint creates the effect of two objects connected by an invisible spring. Constraints are a type of relationship. Simulation objects can also have collision relationships. For example, rigid body objects and fluid simulations can affect each other.
You can apply forces to simulation objects. Simulation objects with different solvers can share the same forces, and you can apply multiple forces to each object.
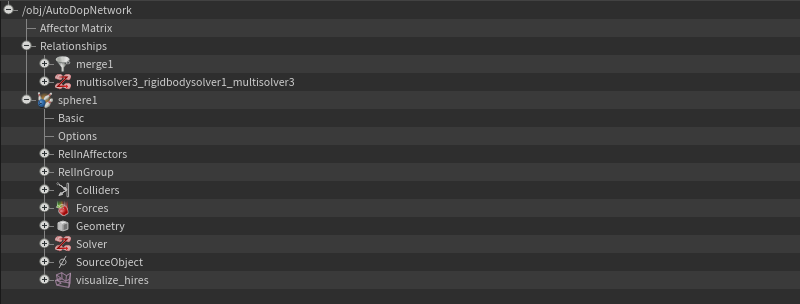
Dynamics networks establish a tree of objects with data applied. The viewport shows you the animated geometry created by the simulation. The Geometry Spreadsheet shows you all the simulation data applied to each object at the current time in a spreadsheet format.
You can add drag, wind, impulse (push force), fields, fans, and other forces (see the Drive simulation tab).
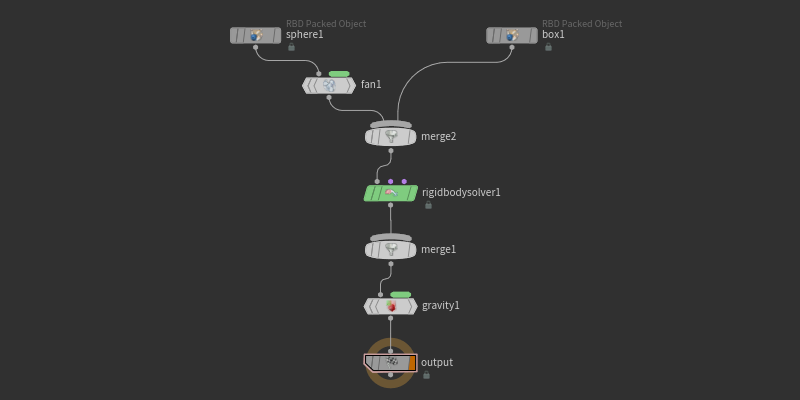
There are many ways to wire a DOP network to get the same result. Nodes that attach data only attach it to the objects that pass through their grey inputs. So you can, for example, limit which objects a certain force applies to by placing the force node at different points in the network, and/or by using the force node’s Group parameter to set a node name pattern to control which objects it applies to.
For example, in the following network, the gravity1 force applies to both sphere1 and box1 because both object’s are eventually wired into it. However, the fan1 force only applies to sphere1, because it is the only object that is wired through fan1.
Time-dependent expressions work slightly differently in dynamics. Instead of $F (current frame) and $T (current time), you should use $SF (simulation frame) and $ST (simulation time). This is because Houdini’s dynamics engine will sometimes move backwards and forwards in time to resolve collisions. When this happens, $F might, say, change to frame 12 twice. $SF and $ST only ever increase.
Subtopics ¶
Learning dynamics ¶
Colliding objects ¶
-
How to break different types of materials.
Simulation types ¶
-
How to simulate smoke, fire, and explosions.
-
How to set up fluid and ocean simulations.
-
How to set up ocean and water surface simulations.
-
How to simulate grainy materials (such as sand).
-
How to simulate different types of solid materials (such as snow, soil, mud, concrete, metal, jello, rubber, water, honey, and sand).
-
How to create and simulate crowds of characters in Houdini.
-
Vellum uses a Position Based Dynamics approach to cloth, hair, grains, fluids, and softbody objects.
-
How to create and simulate deformable objects
-
How to create, style, and add dynamics to hair and fur.
-
How to create particle simulations.
Next steps ¶
-

HQueue is Houdini’s free distributed job scheduling system.
-
Distribute shelf tools set up an object’s sim network so it can be solved in parallel on a farm of multiple machines using HQueue.