

kind of starting in Houdini, sorry if this sounds like a noob question.

ok, so I have this simple rigid body sim where some chains are connected to a gem stone, the upper part (red circles) are an alembic animation (static/deforming rbd), the animation in this case is not too fast. The rest (other colored parts) are all active rbds.
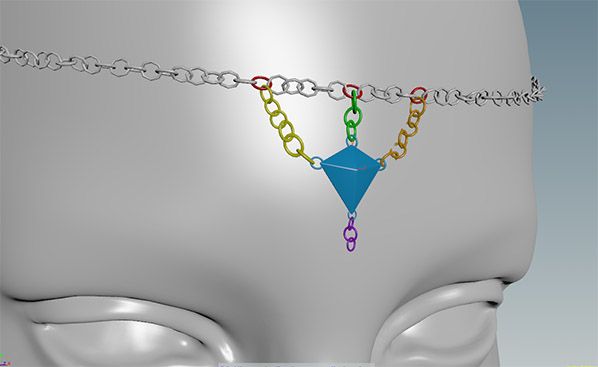
I'm not being able to get a solid result, even with higher substeps, pieces always go through each other breaking the chain. At first I tried the bullet solver (with packed geometry), too unstable..breaks easily..parts explode. (yes I'm using concave geometry)
After trying many settings I decided to changed to Houdini rbd solver which is of course a bit slower (I believe it does not support packed geometry,right?), but is far better and more stable.. still, haven't found a 100% reliable situation, because the chains also break at some point.
For the static rbds I'm using “deform geometry” and “re-evaluate SOPs to interpolate geometry”. Scene scale is set to cm, and the object sizes are pretty much real world. All collision volumes are checked and are small enough to retain details, so I believe I'm having trouble setting optimal engine parameters.
These settings below are kind of working, but too overkill. It needs to run overnight, but I'm sure I would not need this much steps to a relatively simple simulation, right ?
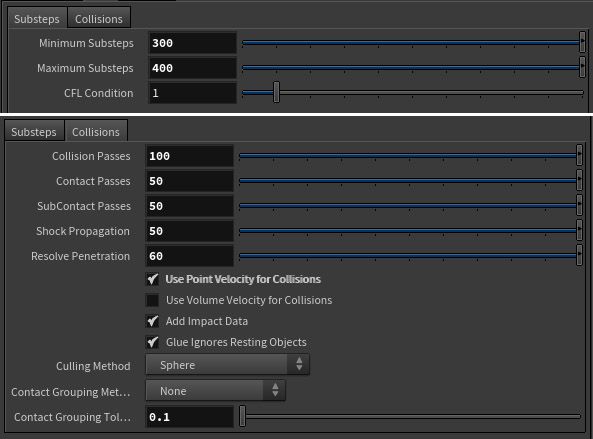
So my real question is, how do you tweak substeps and collision passes when simulating chains?
Thanks a lot!

