| On this page | |
| Since | 13.0 |
POP Metaball Forceノードは、パーティクルとメタボールの距離に応じて、パーティクルにフォースを適用します。
メタボールには、![]() Force SOPを使って
Force SOPを使ってforceアトリビュートをセットアップしなければなりません。
メタボールの範囲内にあるパーティクルが、メタボールから影響を受け、メタボールのウェイトでスケールされます。
このノードは、forceアトリビュートを修正します。
Metaball Forceの使い方 ¶
-
 Metaballシェルフツールを使って、いくつかメタボールを作成します。
Metaballシェルフツールを使って、いくつかメタボールを作成します。 -
Particles タブの
 Metaball Forceツールをクリックします。
Metaball Forceツールをクリックします。 -
パーティクルに影響を与えたいメタボールを選択して、Enterを押します。
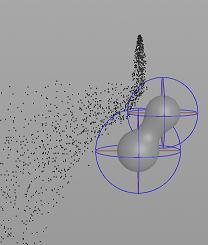
![]() Metaball Forceノードの Force Scale パラメータを設定して、パーティクルを引き寄せたり、引き離すことができます。プラスの値はパーティクルを引き寄せ、マイナスの値はパーティクルを引き離します。
Metaball Forceノードの Force Scale パラメータを設定して、パーティクルを引き寄せたり、引き離すことができます。プラスの値はパーティクルを引き寄せ、マイナスの値はパーティクルを引き離します。
以下のサンプルでは、メタボールがパーティクルを引き離しています。
パラメータ ¶
Activation
このノードを有効/無効にします。この値が0より大きい時のみノードがアクティブになります。 これは、エクスプレッションでノードの効果を制御するのに役に立ちます。
Note
これは、全体としてノードを活動化します。このパラメータを使って特定のパーティクルのノードを非活動にすることはできません。
Group
現行ストリーム内のすべてのポイントからポイントグループ(例えば、![]() Group POPや
Group POPや![]() Collision Detection POPで作成)
にのみ影響を与えます。
Collision Detection POPで作成)
にのみ影響を与えます。
Guide
有効にすると、このノードのガイドジオメトリが表示されます。
Note
ここでガイドジオメトリが有効になっていても、DOPノードの Hidden フラグを使って無効にすることもできます。
Parameters ¶
Geometry Source
使用するジオメトリを指定します。
SOP
SOP Path パラメータで指定したSOPを使用します。
DOP Objects
このDOPネットワーク内の名前付きDOPオブジェクトを使用します。
First Context Geometry
DOPネットワークの1番目の入力に接続されているSOPを使用します。
Second Context Geometry
DOPネットワークの2番目の入力に接続されているSOPを使用します。
Third Context Geometry
DOPネットワークの3番目の入力に接続されているSOPを使用します。
Fourth Context Geometry
DOPネットワークの4番目の入力に接続されているSOPを使用します。
SOP Path
SOPまでのパス( Geometry Source が SOP に設定されている時)。
DOP Objects
DOPオブジェクトの名前( Geometry Source が DOP Objects に設定されている時)。
Force Scale
メタボールのフォーススケールは、この係数でスケールされます。これにより、別々のパーティクルが別々の反応をするようにすることができます。 プラスの値はパーティクルを引き寄せ、マイナスの値はパーティクルを引き離します。
Ignore Mass
入力パーティクル上のmassを無視します。
フォースは、accel(加速度)ではなくforceとして保存されるので、これは、forceとmassのアトリビュートを乗算することで行なわれます。
これは、ソルバで取り消されます。
airresistも同様に乗算されます。
Ignore Mass を有効にすると、RBDオブジェクトの小さな破片が大きな破片と同じ速度で移動します。 これは、より制御可能なシミュレーションに役に立ちます。
Bindings ¶
Geometry
POPノードの適用先となるシミュレーションデータの名前。 これは一般的にはGeometryですが、必要に応じてPOPネットワークを設計して別のジオメトリに適用することができます。
Evaluation Node Path
ローカルエクスプレッションを持つノードに関しては、これは、VEXのch()形式のエクスプレッションを何処を基準に評価するか制御します。
このパラメータを.に設定すれば、相対参照が働きます。
HDA内にノードを埋め込み、さらにローカルエクスプレッションをエクスポートするのであれば、このパラメータをプロモートすることが重要です。
入力 ¶
First Input
このオプションの入力には2つの用途があります。
1つ目が、他のPOPノードに接続すると、このノードを実行する前に、それらのノードが実行されます。チェーン状に繋がったノードは、上から下に処理されます。
2つ目が、入力チェーンにストリームジェネレータ(例えば、![]() POP Location,
POP Location, ![]() POP Source,
POP Source, ![]() POP Stream)があると、
このノードは、そのストリーム内のパーティクルにだけ作用します。
POP Stream)があると、
このノードは、そのストリーム内のパーティクルにだけ作用します。
出力 ¶
First Output
このノードの出力をソルバチェーンに接続してください。
Mergeノードを使用すれば、複数のソルバチェーンを結合することができます。
最後の接続は、![]() POP Solverや
POP Solverや![]() FLIP Solverなどのフルソルバの紫の入力のどれかに接続してください。
FLIP Solverなどのフルソルバの紫の入力のどれかに接続してください。
ローカル変数 ¶
channelname
このDOPノードはData Optionsページの各チャンネルとパラメータに対して、チャンネルと同じ名前のローカル変数を定義します。 例えば、ノードにPositionのチャンネル(positionx、positiony、positionz)とオブジェクト名のパラメータ(objectname)があるとします。
そのノードには、positionx、positiony、positionz、objectnameの名前を持つローカル変数も存在します。これらの変数は、そのパラメータに対する前の値を評価します。
この前の値は、処理されているオブジェクトに追加されたデータの一部として常に保存されています。 これは、本質的には以下のようなdopfieldエクスプレッション関数のショートカットです:
dopfield($DOPNET, $OBJID, dataName, "Options", 0, channelname)
データがまだ存在しないなら、ゼロの値または空っぽの文字列が返されます。
DATACT
この値は、現在のデータが作成されたシミュレーション時間(変数STを参照)です。 このノードが新しいデータを作成せずに既存データを変更していれば、この値は現在のシミュレーション時間と同じにはなりません。
DATACF
この値は、現在のデータが作成されたシミュレーションフレーム(変数SFを参照)です。 このノードが新しいデータを作成せずに既存データを変更していれば、この値は現在のシミュレーションフレームと同じにはなりません。
RELNAME
この値は、データがリレーションシップ(例えば、Constraint Anchor DOPがConstraint DOPの2番目、3番目、4番目の入力に接続されている時)に追加されている時だけ設定されます。
この場合では、この値は、データが追加されているリレーションシップの名前に設定されます。
RELOBJIDS
この値は、データがリレーションシップ(例えば、Constraint Anchor DOPがConstraint DOPの2番目、3番目、4番目の入力に接続されている時)に追加されている時だけ設定されます。
この場合では、この値は、データが追加されているリレーションシップのAffected Objectsすべてに対するオブジェクトIDをスペース区切りにしたリストの文字列に設定されます。
RELOBJNAMES
この値は、データがリレーションシップ(例えば、Constraint Anchor DOPがConstraint DOPの2番目、3番目、4番目の入力に接続されている時)に追加されている時だけ設定されます。
この場合では、この値は、データが追加されているリレーションシップのAffected Objectsすべてに対するオブジェクト名をスペース区切りにしたリストの文字列に設定されます。
RELAFFOBJIDS
この値は、データがリレーションシップ(例えば、Constraint Anchor DOPがConstraint DOPの2番目、3番目、4番目の入力に接続されている時)に追加されている時だけ設定されます。
この場合では、この値は、データが追加されているリレーションシップのAffector Objectsすべてに対するオブジェクトIDをスペース区切りにしたリストの文字列に設定されます。
RELAFFOBJNAMES
この値は、データがリレーションシップ(例えば、Constraint Anchor DOPがConstraint DOPの2番目、3番目、4番目の入力に接続されている時)に追加されている時だけ設定されます。
この場合では、この値は、データが追加されているリレーションシップのAffector Objectsすべてに対するオブジェクト名をスペース区切りにしたリストの文字列に設定されます。
ST
ノードが評価されるシミュレーション時間です。
この値は、変数Tで表現される現在のHoudiniの時間と同じではなく、![]() DOP Networkの Offset Time と Scale Time のパラメータの設定に依存しています。
DOP Networkの Offset Time と Scale Time のパラメータの設定に依存しています。
STは、シミュレーションの開始時間がゼロになるようになっています。
つまり、シミュレーションの最初のタイムステップをテストする時は、$T == 0や$FF == 1を使うのではなくて、$ST == 0のようなテストを使うのがベストです。
SF
ノードが評価されるシミュレーションフレーム(正確には、シミュレーションタイムステップ番号)。
この値は、変数Fで表現される現在のHoudiniのフレーム番号と同じではなく、![]() DOP Networkパラメータの設定に依存しています。
代わりに、この値は、シミュレーション時間(ST)をシミュレーションタイムステップサイズ(TIMESTEP)で割算した値と同じです。
DOP Networkパラメータの設定に依存しています。
代わりに、この値は、シミュレーション時間(ST)をシミュレーションタイムステップサイズ(TIMESTEP)で割算した値と同じです。
TIMESTEP
シミュレーションタイムステップのサイズ。 この値は、1秒あたりのユニットで表現した値をスケールするのに役に立ちますが、タイムステップ毎に適用されます。
SFPS
TIMESTEPの逆数。 シミュレーション時間の1秒あたりのタイムステップ数です。
SNOBJ
シミュレーション内のオブジェクトの数。
![]() Empty Object DOPなどのオブジェクトを作成するノードでは、SNOBJは、オブジェクトが評価される度に値が増えます。
Empty Object DOPなどのオブジェクトを作成するノードでは、SNOBJは、オブジェクトが評価される度に値が増えます。
固有のオブジェクト名を確保する良い方法は、object_$SNOBJのようなエクスプレッションを使うことです。
NOBJ
このタイムステップ間で現行ノードで評価されるオブジェクトの数。 この値は、多くのノードがシミュレーション内のオブジェクトすべてを処理しないので、SNOBJとは異なります。
NOBJは、ノードが各オブジェクトを続けて処理(例えば、![]() Group DOP)しないなら0を返します。
Group DOP)しないなら0を返します。
OBJ
ノードで処理される特定のオブジェクトのインデックス。 この値は、指定したタイムステップで常にゼロからNOBJ-1まで実行されます。 この値は、OBJIDやOBJNAMEなどのシミュレーション内の現行オブジェクトを識別せず、現在の処理順でのオブジェクトの順番を識別します。
この値は、オブジェクト毎に乱数を生成するのに役に立ちます。他には、処理別にオブジェクトを2,3のグループに分けるのに役に立ちます。
この値は、ノードがオブジェクトを続けて処理(例えば、![]() Group DOP)しないなら-1を返します。
Group DOP)しないなら-1を返します。
OBJID
処理されているオブジェクトの固有ID。 すべてのオブジェクトは、すべての時間のシミュレーション内のオブジェクトすべてで固有な整数値が割り当てられています。たとえオブジェクトが削除されても、そのIDは決して再利用されません。 オブジェクトIDは、オブジェクト毎に別々の処理をさせたい場面(例えば、オブジェクト毎に固有の乱数を生成したい)で非常に役に立ちます。
この値は、dopfieldエクスプレッション関数を使って、オブジェクトの情報を検索するのにベストな方法です。
OBJIDは、ノードがオブジェクトを続けて処理(例えば、![]() Group DOP)しないなら-1を返します。
Group DOP)しないなら-1を返します。
ALLOBJIDS
この文字列には、現行ノードで処理されているオブジェクトすべての固有のオブジェクトIDをスペース区切りにしたリストが含まれています。
ALLOBJNAMES
この文字列には、現行ノードで処理されているオブジェクトすべての名前をスペース区切りにしたリストが含まれています。
OBJCT
現行オブジェクトが作成された時のシミュレーション時間(変数STを参照)。
そのため、オブジェクトが現在のタイムステップで作成されたかどうかチェックするには、$ST == $OBJCTのエクスプレッションが常に使われます。
この値は、ノードがオブジェクトを続けて処理(例えば、![]() Group DOP)しないなら0を返します。
Group DOP)しないなら0を返します。
OBJCF
現行オブジェクトが作成された時のシミュレーションフレーム(変数SFを参照)。
この値は、OBJCT変数にdopsttoframeエクスプレッションを使ったものと等価です。この値は、ノードがオブジェクトを続けて処理(例えば、![]() Group DOP)しないなら0を返します。
Group DOP)しないなら0を返します。
OBJNAME
処理されているオブジェクトの名前を含んだ文字列値。
オブジェクト名は、シミュレーション内で固有であることが保証されていません。 しかし、オブジェクト名が固有になるように注意して名前を付けていれば、オブジェクトの識別は、オブジェクトIDよりも、オブジェクト名を指定するほうが簡単です。
オブジェクト名は、同じ名前を持つオブジェクトの数を仮想グループとして扱うこともできます。
“myobject”という名前のオブジェクトが20個あれば、DOPのActivationフィールドにstrcmp($OBJNAME, "myobject") == 0を指定すると、DOPがその20個のオブジェクトのみを操作します。
この値は、ノードがオブジェクトを続けて処理(例えば、![]() Group DOP)しないなら空っぽの文字列を返します。
Group DOP)しないなら空っぽの文字列を返します。
DOPNET
現在のDOP Networkのフルパスを含んだ文字列値。 この値は、ノードを含むDOP Networkのパスを知りたりDOPサブネットのデジタルアセットで非常に役に立ちます。
Note
ほとんどのダイナミクスノードには、そのノードのパラメータと同じ名前のローカル変数があります。
例えば、![]() Position DOPでは、以下のエクスプレッションを記述することができます:
Position DOPでは、以下のエクスプレッションを記述することができます:
$tx + 0.1
これはオブジェクトをタイムステップ毎にX軸方向に0.1単位分移動させます。
| See also |