| On this page | |
| Since | 12.5 |
標準ボリュームとOpenVDBボリュームの説明は、ボリュームを参照してください。
このノードは、距離フィールド(符号付き(SDF)または符号なし)とDensity(Fog)フィールドを作成することができます。
VDBプリミティブは、各ポイント周辺にボクセルを保存するだけなので、標準のHoudiniボリュームを作成するよりも高い効果的な解像度を持つことができます。
Note
このノードは、入力ポイントのポイントスケールアトリビュート(pscale)を使用して、それらのアトリビュートを球状の密度に変換します。
このアトリビュートは、Attribute POPまたはPoint SOPで設定されます。
ポイントが1.5ボクセルよりも小さい場合、それらのポイントを計算できないのでVDBでは表示されません。
Point Radius Scale パラメータを使って、すべてのサイズをスケールすることもできます。
VDBを2番目の入力に接続すれば、自動的にそのVDBの向きとボクセルサイズが使われます( Reference VDB パラメータを参照)。
パラメータ ¶
Voxel Size
生成されるVDBボリュームプリミティブのボクセルサイズ。 これより小さいポイントはVDBで計算することができないので、出力されません。
Reference VDB
2番目の入力を接続すると、2番目の入力のVDBプリミティブの名前を入力することで、そのVDBの向きとボクセルサイズをコピーすることができます。
ボリュームの指定を参照してください。
Distance VDB
距離フィールドVDBを作成します。各ボクセルは一番近いポイントまでの距離を記録します。
Fog VDB
Densityフィールドを作成します。ポイントの内側(つまり、そのポイントのpscaleアトリビュートで定義された半径で、そのポイントを中心とする球の内側)のボクセルが1、外側のボクセルが0です。
Mask VDB
マスクフィールドVDBを作成します。
アルファマスクを生成します。これは、パーティクルからのレベルセットサーフェスを後で拘束されるレベルセットスムージングで非常に役に立ちます。 このアルファマスクは、パーティクルの最大半径によるレベルセットサーフェスとパーティクルの最小半径によるレベルセットサーフェス間のCSGの差分から派生したfogボリュームとして定義されます。 このマスクは、後のレベルセットスムージングを最小/最大サーフェス間で拘束して、サーフェスのディテールが完全に平滑化されてしまう問題を回避することを保証します。
Point Attributes
Pointアトリビュートの値を記録するVDBプリミティブを追加生成することができます。 そのポイントの近くのボクセルのみが設定されます。
Attribute
VDBの作成元となるPointアトリビュート。
VDB Name
アトリビュート値を記録した、生成されるVDBプリミティブの新しい名前。 このフィールドを空っぽにすると、アトリビュート名が使われます。
Vector Type
ベクトル値の解釈の仕方。
Point Radius Scale
変換前に、パーティクルサイズ(pscaleアトリビュート)をこの値で乗算します。
Minimum Radius in Voxels
このボクセル数より小さい半径のポイントが無視されます。
1.5ボクセルより小さい半径のポイントは、おそらくギザギザの画面の乱れが発生するので、この値を1.5より小さくしないでください。
Prune
VDBグリッドを構築した後、未検出な拘束タイルがある場合があります。これを有効にすると、一定領域を検出して、その領域をつぶします。 このオプションは、パーティクルが大きくなる時のみ効果があり、リーフノードでは、通常では、無効のままにすることを推奨します。
Mask Width Scale
このスケールパラメータを使えば、生成されるマスクVDBの幅を調整することができます。
Use World Space for Band
Half-Band をHoudiniの単位を使って指定するかどうか設定します。 このオプションがオフなら、 Half-Band パラメータの単位はボクセルになります。
Half-Band Voxels
生成されるVDBを満たすポイント球の外側のボクセル数( Use world space for band がオフの時)。
Half-Band
生成されるVDBを満たすポイント球の外側のHoudini単位の数( Use world space for band がオンの時)。
Merge With Reference VDB
参照VDBを指定すると、新しいパーティクルが、その符号付き距離フィールドに結合されます。 これは、パーティクルを使って、サーフェスのディテールのみを指定することができますが、大部分に使用される粗くて、オフセットされたグリッドを持ちます。
Particle Footprint
Fog VDB がオンの時に、ポイントから作成される密度の形状。
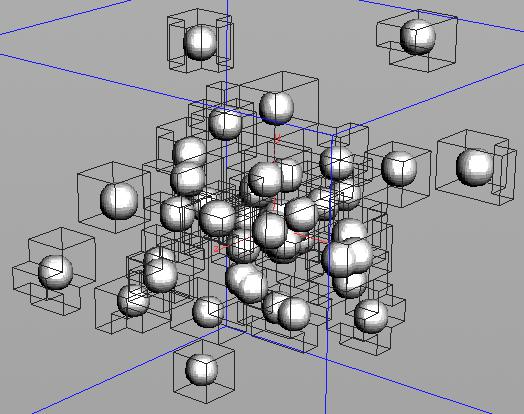
Spherical
ポイントのポイントスケールアトリビュート(pscale)で定義された半径で、そのポイントを中心とする球を作成します。
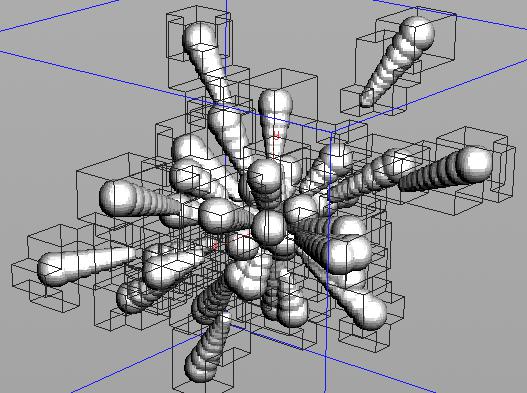
Velocity trail
ポイントのVelocityアトリビュート(v)の方向に向かう 複数の球 を作成します。
これは可視化で役に立ちます。
Velocity Multiplier
Particle Footprint が“Velocity trail”の時、これはPoint Velocityアトリビュート(v)を基準に軌跡の長さをスケールします。
Velocity Spacing
Particle Footprint が“Velocity trail”の時、その軌跡の球の間隔。
入力 ¶
Particles to convert
変換するポイントジオメトリ。
Optional reference VDB
接続すると、このノードは、この入力のVDBプリミティブから向きとボクセルサイズをコピーします。
| See also |